Blog
Shop
Artists
Amy Annelle
Blanket Music
Bobby Birdman
Casey Dienel
Corrina Repp
Carlos Forster
Dat’r
The Decemberists
Fancie
Flash Hawk Parlor Ensemble
Graves
Hosannas
Igor Khabarov
Jeff London
Kaitlyn Ni Donovan
Kele Goodwin
Kind Of Like Spitting
Laura Gibson
Loch Lomond
Nick Jaina
Nils Frahm & Anne Müller
Noise For Pretend
Novi Split
Norfolk & Western
The Operacycle
Parks & Recreation
Peter Broderick
The Places
Podington Bear
Rauelsson
Reclinerland
Run On Sentence
Shelley Short
Super XX Man
Velella Velella
YEYEY
Shows
0 items
Blog
Shop
Artists
Amy Annelle
Blanket Music
Bobby Birdman
Casey Dienel
Corrina Repp
Carlos Forster
Dat’r
The Decemberists
Fancie
Flash Hawk Parlor Ensemble
Graves
Hosannas
Igor Khabarov
Jeff London
Kaitlyn Ni Donovan
Kele Goodwin
Kind Of Like Spitting
Laura Gibson
Loch Lomond
Nick Jaina
Nils Frahm & Anne Müller
Noise For Pretend
Novi Split
Norfolk & Western
The Operacycle
Parks & Recreation
Peter Broderick
The Places
Podington Bear
Rauelsson
Reclinerland
Run On Sentence
Shelley Short
Super XX Man
Velella Velella
YEYEY
Shows
0 items
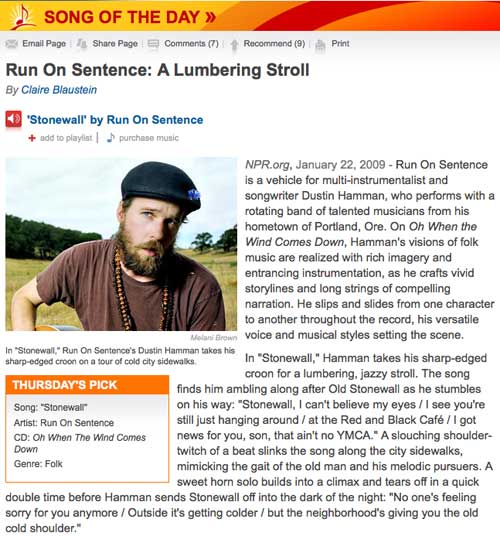
ros1
January 23, 2009
In
ros1
Advanced Thin Capitalisation Agreements
Änderung des mietvertrages